두 벡터를 이용한 진행 방향 알아보기 with Unreal
구현 목표
벡터의 내적과 외적을 이용해서 캐릭터의 진행 방향 알아보기
구현 과정
1. 캐릭터의 방향
먼저, 캐릭터의 방향입니다.
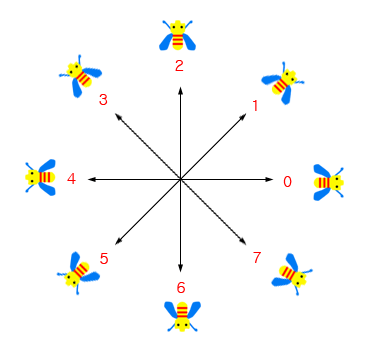
캐릭터의 방향은 2D 공간에서는 상하좌우(4방향), 3D 공간에서는 상하좌우 4방향 + 대각 4방향으로 총 8방향입니다.
이러한 방향의 각도는 -180도 ~ 180도 사이의 값으로 모두 표현이 가능하답니다.
2. 두 벡터 정하기

위 이미지의 파란선은 캐릭터의 ForwardVector, 빨간선은 VelocityVector 입니다.
이미지에서는 진행 방향에 따른 애니메이션이 재생하고 있지만 저희는 앞으로 가는 애니메이션만 있다고 가정해보죠.
여기서 중요하게 봐야하는 것은 VelocityVector입니다. 캐릭터가 어느 쪽으로 힘(속도)를 내고 있는지 알려주고 있어요. 설정 값에 따라 달라지겠지만 지금은 기본 속도인 600으로 움직이네요.
그러면 이러한 의문이 들 수 있습니다.
진행방향은 VelocityVector만 구하면 되는거 아닌가요?
맞습니다. 물리에서 벡터는 방향을 가진 스칼라 값이죠. 하지만 우리는 애니메이션을 사용합니다. 그러면 애니메이션을 볼까요?
언리얼 애니메이션 블랜드 스페이스는 float의 입력값을 가지고 상태를 변경합니다. 그래서 위의 Vector형태로는 입력할 수 없어요.
그래서 이를 실수값으로 바꿔주는 겁니다.
다시 두 벡터로 돌아와서, 그러면 왜 하필 ForwardVector 와 VelocityVector 일까요?
이는 앞서 설명한 -180도 ~ 180도 사이의 각도를 표현할 수 있기 때문입니다. 위 이미지를 다시 보시면 두 벡터의 각도가 이 사이의 값인 걸 볼 수 있을거에요.
3. 벡터의 내적
일반적으로 두 벡터 사이의 각도를 계산하기 위해서는 내적을 사용합니다.
언리얼에서는 FMath의 DotProduct 함수를 사용하시면 됩니다.
내적 공식은 다음과 같습니다.
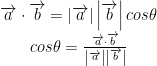
내적을 통해 최종 값은 알아내었는데, 각도는 아직이죠. 각도는 아크 코사인을 통해 알아낼 수 있습니다.
언리얼에서는 Acos 함수를 사용하면 됩니다.

위 이미지의 왼쪽 상단을 보시면 방향에 맞는 각도가 출력되고 있어요. (잘 안보이네요)ㅎ;
W: 0 / S: 180 / A: 90 / D: 90
그런데 좌우의 값이 똑같습니다. 이렇게 된다면 우리가 왼쪽으로 움직이는지 오른쪽으로 움직이는지 알 수가 없습니다.
이러한 경우 어떻게 해야 될까요?
4. 벡터의 외적
이전까지 두 벡터의 각도의 값을 구해보았습니다. 이제 남은 문제는 각도의 부호를 결정하는 것이네요.
각도의 부호를 결정하려면 외적을 사용하면 됩니다.
이 역시 언리얼에서 함수를 제공하고 있어요. FMath의 CrossProduct가 그것인데요.
여기서 중요한 점은 외적을 통해 두 벡터의 방향을 결정할 수 있다는 것입니다.
외적을 이용하면 최종적으로 두 벡터에 대해 수직인 벡터를 구할 수 있습니다.
참고로 언리얼 엔진은 왼손 좌표계를 이용합니다.

위 이미지의 왼쪽 상단을 보시면 부호있는 값이 출력되고 있어요.
W: 0 / S: 0 / A: -1 / D: 1
5. 적용
이제 앞 선 과정들을 적용하는 단계만 남았습니다. 내적의 값과 외적의 값을 곱하자니 W,S 에서는 0이 나오게 됩니다.
부호만 따로 가져올 수 없을까요?
언리얼에서는 이 기능 역시 제공합니다. FMath의 Sign 함수인데요. 이 함수를 사용하면 해당 값의 부호를 가져올 수 있습니다.
다음은 위 과정을 언리얼 코드로 변환한 것입니다.
1 | float AHeroCharacter::GetMovementDirection() const |
마무리
오늘 게시글에서는 내적과 외적을 이용한 두 벡터의 진행 방향을 알아보았습니다.
어떠셨나요? 쉽게 이해가 되셨나요? 그렇다면 다행입니다. 그럼 저는 다음에 더 좋은 게시글로 찾아오도록 하겠습니다.


![[크래프톤 정글 - 게임테크랩] Week01를 마치며](/img/cover.jpeg)